Redes Neuronales Interactivas
Pulsa las flechas para cambiar las escenas.
La red neuronal usada en las 2 primeras escenas es la siguiente:

Usa los sliders para cambiar los pesos y los biases de las neuronas.
En todas las escenas se desarrolla una red neuronal capaz de decidir si un terreno es valido para el café teniendo en cuenta su altitud y temperatura. Los puntos verdes son aquellos terrenos donde si es valido y los rojos los que no lo son. La zona verde es aquella que la red neuronal determina como valida para cualquier terreno que este dentro de ella, y la zona roja será invalida.
Primera escena:
- Red neuronal de perceptrones sin función de activación.
- Dataset: El café es valido si la temperatura del terreno es mayor a 18 grados
Segunda escena:
- Red neuronal de perceptrones con función de activación.
- Dataset; El café es valido si la temperatura es mayor a 18 y la altitud superior a 800m
El resto de escenas usan una red neuronal multicapa que sigue la siguiente estructura:
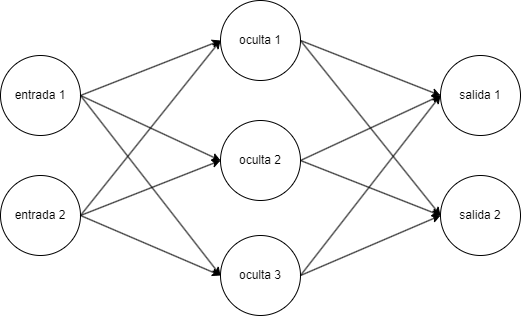
El primer set de sliders modifican los pesos y biases entre la capa de entrada y la oculta. El segundo set altera los pesos que conectan la capa oculta y la de salida.
Tercera escena
- Red neuronal multicapa
- Dataset: El cafe es valido entre 18 y 24 grados y entre 800m y 2000m
Cuarta escena
- Red neuronal multicapa con neuronas sigmoide.
Quinta escena
- Red neuronal multicapa con neuronas sigmoide
- Visualizacion de la función de coste
Sexta escena
- Demostración del descenso de gradiente en una función de tercer grado
Séptima escena
- Red neuronal multicapa con neuronas sigmoide
- Visualización de la función de coste
- Aprendizaje por descenso de gradiente
- Mini-batching
- El dataset se genera pseudo aleatoriamente. Debido a la sencillez de la red y el escaso numero de ejemplos existe la posibilidad de que la red llegue a un mínimo relativo sin haber clasificado correctamente todos los datos.
Octava escena
- Red neuronal multicapa con neuronas sigmoide
- Visualización de la función de coste
- Aprendizaje por backtracking
- Mini-batching
Novena escena
- Red neuronal multicapa con neuronas sigmoide/tangentes hiperbolicas
- La red neuronal aprende a conducir por un circuito.
- Aprendizaje dinámico mediante algoritmos genéticos
- Batching de cada generación para aumentar el rendimiento de la simulación
- Gestión de la velocidad de la simulación
- La red neuronal de cada coche esta formada por 6 neuronas de entrada (5 rayos que indican la distancia a la pared más cercana hacia delante, derecha izquierda y diagonales y la magnitud de su velocidad), 5 neuronas sigmoides en una capa oculta y 2 neuronas tangenciales hiperbólicas de salida (una indicando la magnitud de la acelerecación y otra la del giro)

Leave a comment
Log in with itch.io to leave a comment.